Julian Huber & Matthias Panny
streamlit
Alternativen zu diesem Projekt werden zum Schluss diskutiert
(Simulation mechanischer Strukturen & Topologieoptimierung)
*Klassisches Beispiel: Messerschmitt–Bölkow–Blohm (MBB) Balken wie hier dargestellt
Topologieoptimierung durch Entfernen von Massenpunkten → alle daran angeschlossenen Federn werden ebenfalls entfernt
Optimierungskriterium: Minimierung der Gesamtverformung
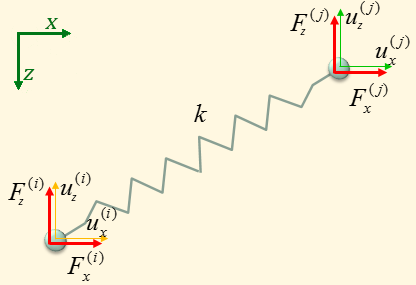
Wir brauchen eine mathematische Beschreibung der Federn um deren Verformung unter Belastung zu berechnen
Wir brauchen eine effiziente Beschreibung/Datenstruktur für die Vernetzung der Federn zu einem System
& unbekannt bzw. irrelevant
Es folgt das bekannte Hooke'sche Gesetz → Gleichung reduziert sich
Alternative Beschreibung:
Federn in beliebiger Orientierung?
Transformation unserer Steifgkeitsmatrix on zuvor notwendig
Richtungsvektor der Feder:
Daraus lässt sich die Transformationsmatrix ableiten
Für die gedrehte Feder gilt
Dies lässt sich auch auf die horizontale Feder zurückführen:
solver.py
Topologieoptimierung: Massenpunkte und daran angeschlossene Federn werden entfernt → Berechnung aber immer gleich
Ist es sinnvoll nur eine Datenstruktur zu verwenden oder kann es Vorteile haben mehrere zu kombinieren?
requirements.txt
README.md
Python
png
jpg
streamlit-drawable-canvas
stl
OpenSCAD
main
master
genaue Aufgabenstellung